
 产品:110
产品:110
 联系我们
联系我们


ABB机器人相关技术
点焊,处理和不同之处在于激光切割是基于在连续过程中的运动状态的控制,除了具有定位点的精度要求高的机器人的运动准确性和可重复性其他运动控制,而且还对机器人轨迹即移动机器人的线性内插和圆弧轨迹的精度提出了很高的要求。倒角切割激光切割和切割小圆的精度和稳定性可以是机器人的运动控制的良好量度。
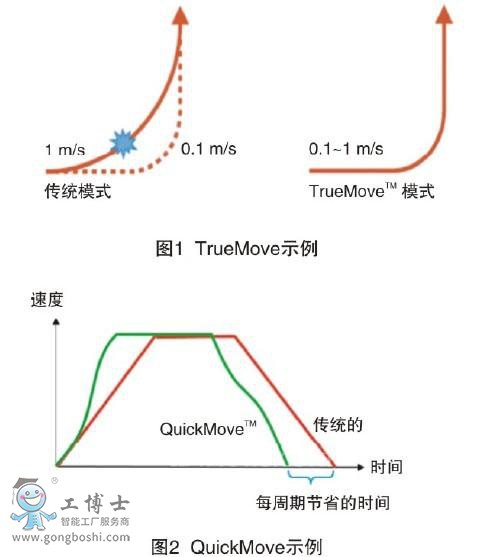
True Move和Quick Move技术
传统机器人在低速时的实际路径与编程路径一致,但在高速转弯时实际路径会偏离编程路径。基于先进的前馈伺服控制技术,真移动大大提高了运动控制的精度,解决了机器人的实际运动轨迹与编程轨迹高速偏离的问题,真正实现了编程的开箱即用。
Advanced shape tuning and wrist move technology
ABB开发的高级形状调整软件能够对机器人轴的摩擦功能进行补偿,对复杂的三维切割路径中机器人的微抖动和共振进行及时、准确的补偿。
离线编程和的人机交互界面模拟
Robot studio是ABB公司开发的一款离线编程与仿真软件,它可以在计算机上完成几乎所有的机器人编程与仿真。通过robot studio,仿真可以非常逼真,使用的所有机器人和配置文件都是实际使用的。采用abb**精度校正系统,仿真结果可以达到较高的精度。Robot studio还可以方便地导入IGES、step、CATIA等主流CAD格式的数据,然后根据这些**的数据编制机器人程序。

Abb 机器人使用一个触摸屏演示器,柔性摆动,带有操纵杆和简单的键盘设计,操作方便。 同时,abb 开发的专用切割操作软件具有良好的激光切割人机界面。 在教学设备上以图形化、数字化的形式显示了切削参数设定、轴摩擦调整和 i / o 监控的界面,界面友好,方便用户对系统进行监控和操作。
来源:网络
更多资讯:ABB机器人